7月4日- 5日,2018百度AI开发者大会在北京国家会议中心隆重举行,大会上展示了众多落地化成果。此次大会上百度首次举办AI设计论坛,百度设计体验委员会主席、百度人工智能交互设计院院长、百度用户体验中心总经理关岱松及设计团队分享了百度在AI设计和用户体验方面的经验及思考,共同交流AI智能美学及创意等方面的最前沿发展。论坛上百度与湖南大学的战略合作正式启动,整合百度在AI交互设计领域的优势和湖南大学先进的科研能力,双方将共建联合创新实验室及博士后基地,在AI设计领域进行更多更有价值的合作与探索。 人机交互的困境已经成为机器人发展的重要因素,AI设计论坛上发布了机器人的自然情感人机交互模型NIRO,可以让机器人产品更快进入协同智能时代。NIRO由机器人自然语言交互模型、人类情绪应对模型、机器人主动交流交互模型三部分组成。现在可以通过百度人工智能交互设计院公众号(BaiduAIID)进行预约申请,也可同时预约自然语言人机交互模型,欢迎大家同步预约体验。
以下为演讲实录:
各位开发者,各位嘉宾,我是百度体验架构师李士岩。此刻我非常的兴奋,因为在接下来时间里我将分享关于《机器人的人机交互体验重构》,他将会使机器人的人机交互体验进入一个全新的阶段。
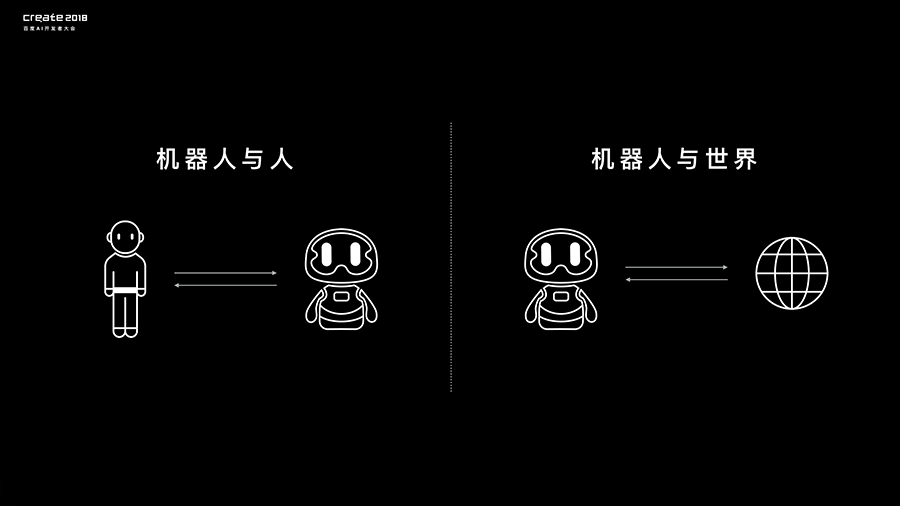
Robot这个词的第一次出现是在1921年的戏剧作品中,他的词根是robota,它的意思是“苦力”,可以说机器人从诞生的第一天就承载这人类的巨大梦想,这个梦想是将人类从繁重的劳动这解放出来。从交互角度,人的劳动包含两个部分,第一部分来自于人与世界的交互,比如说洗衣服、搬运、做饭。第二部分来自于人与人的交互,比如说指路,咨询,讲故事。所以如果机器人想要完成他的使命,必须解决两方面的交互问题。它的第一个维度是机器人与世界的交互,第二个维度是机器人与人的交互。
机器人与世界的交互是由科学和技术主导的部分,已经取得了长足的进步。而机器人与人的交互是要由设计将技术与科学转化为体验好的人机互动方式,在这方面依据处于起步阶段。
机器人与人的交互目前存在三方面的问题,第一方面是“不够自然的语音交互”,目前在很多机器人上,与机器人开启对话时用户需要点击机器人身上的按钮,每输出一个指令必须要喊一次他的名字。而在人与人的对话当中,我们不会每说一句话都喊一次对方的名字,我上一次这样做还是几年前我和别人吵架的时候。
第二方面是机器人不关注用户的情感,当用户和产品交互时,产品越具备人的特征,人越倾向于输出他的情感,人类具备6种基本情绪和27种丰富情感,而目前无论你处于什么情绪,机器人永远给出唯一答案。
第三方面是不够主动,经过我们的调研有85%的用户对机器的主动交流有明确期待,且在用户体验上会带来明显的体验增益。而目前关于机器人的主动交流我们依旧不清楚应该怎做。
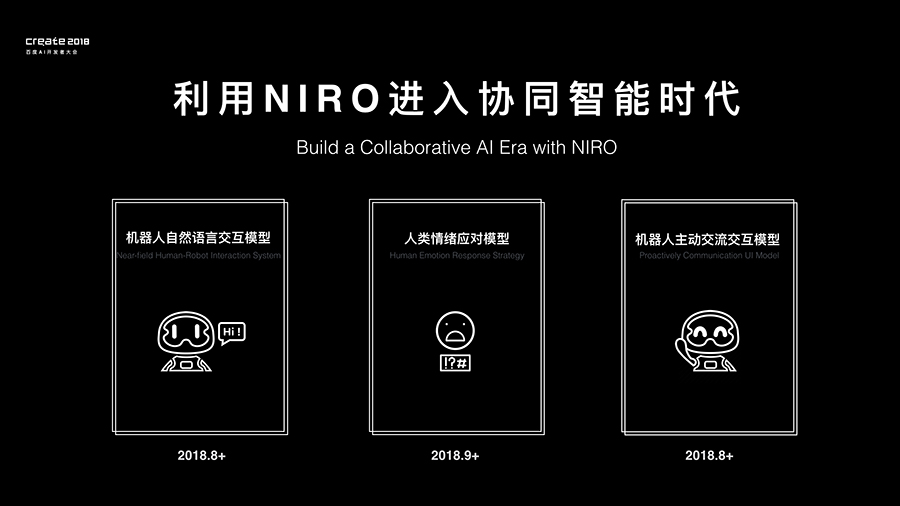
这三个方面的问题,已经逐步使得用户失去了与机器人互动的信心,使得机器人失去了吸引力,成为了阻碍服务发展的重要因素。因此我们必须重构机器人的人机交互体验。所以今天我向大家隆重的介绍NIRO,NIRO是机器人的人机交互系统,他包含三个部分,分别是机器人自然语言交互模型,机器人的人类情绪应对模型,机器人的主动交流模型。
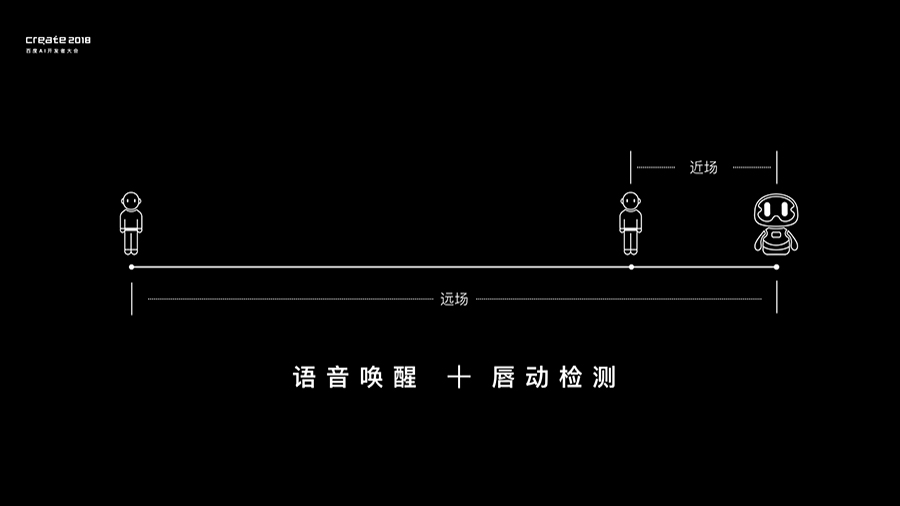
第一部分是机器人的自然语言交互模型。人与人的交流有远场和近场两个场景,当远场是我们通常会喊对方的名字开始交流,而近场时我们往往直接开始对话。对应的机器人也是如此。NIRO的远程交互模型是经典的语音交互模型,他的唤醒是语音唤醒,利用的是麦克风阵列。但与近场语音交互我们进行了重新设计,它的第一步是距离检测,利用是激光或双目摄像头。当检测用户与机器人的距离到达一定距离后,自动进入近场语音交互模式。近场语音交互模式的核心是人脸锁定与唇动检测,人脸锁定解决了交互对象的问题,唇动检测解决了环境嘈杂造成了误输入问题。利用远程的语音唤醒和近场的唇动检测模式,我们实现和嘈杂环境下多人的自然交互。经过试验环境下测试,近场自然语音交互模式每4轮对话效率提升5%,单轮对话下的主观感受比唤醒词的非one shot方式提升56.2%,比one shot模式提升31.2% 。
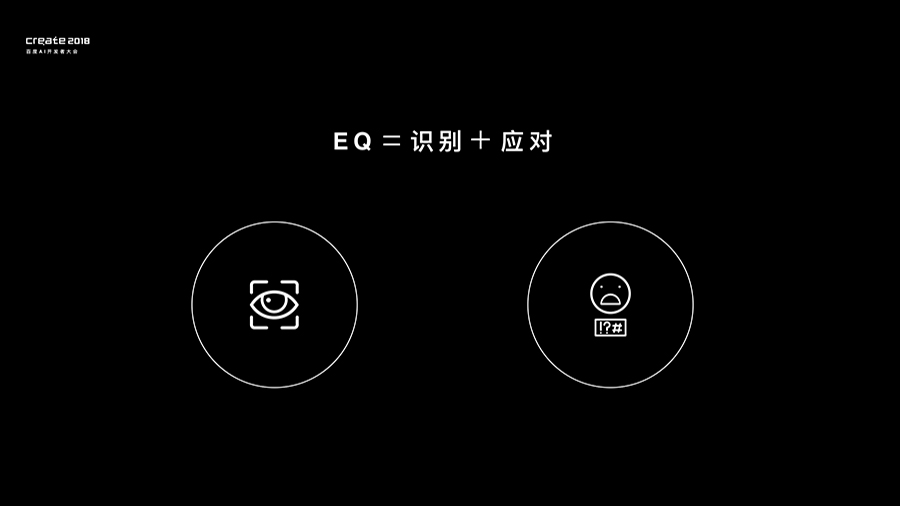
第二部分是人类情绪应对模型,人是情感动物,在人机交互发展的几十年里机器的IQ有了大幅提升,但是机器的EQ尚未得到发展,而当两个机器人IQ相同的时候一个EQ更高的机器人一定更受欢迎。EQ包含两个部分,情绪的识别与应对。
关于情绪的识别,我们东方人的表达情绪通常比较含蓄,为此我们利用东方人的人脸数据进行识别训练,随之数据量的增大它的精准度会逐渐提高。
关于情绪的应对,他有两个场景,一个是带有情绪的输出指令和负向情绪的调节。在实验室我们通过情绪的激发,测试不同的应对策略,同时观察用户情绪的曲线变化。我们发现当用户处于悲伤状态时,机器人的应对策略是悲伤情绪和安抚策略,当用户处于愤怒时机器人的应对策略是谦卑和认错、提升。人的6种基本情绪和27种丰富情感中的主要部分,他的详细应对策略我们都会对外发布。通过这种方式,我们让机器从无论你处于什么情绪状态机器人都是统一回答,进化到机器能够感知用户情绪,进而给出个性化应对策略。
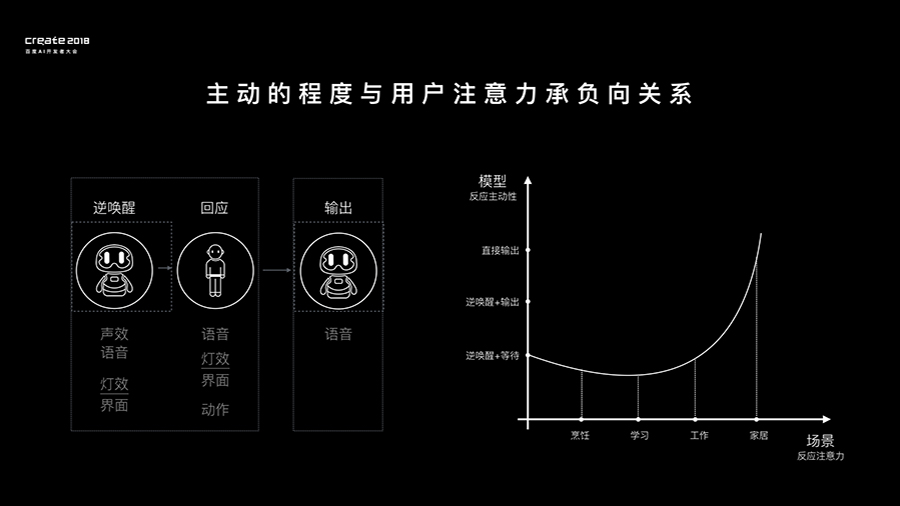
第三部分是主动交流的人机交互模型,主动交流的前提是情境识别,在一些场景想用户会担心自己的隐私被侵犯,所以一定有一些场景是不适合主动交流的。而一个过分主动的机器会被当成干扰,一个完全不主动的机器则丧失了他的智能度和吸引力。所以说主动交流必须回答三个问题,在什么场景下,主动到什么程度和用什么方式。
通过实验我们梳理和家居环境和工作环境下的八大场景,以及我们发现主动交流的程度和用户在当前任务下的注意力投射程度成反向关系。比如在家居环境下直接输出的主动交流模式,还是在工作场景下的主动交流模式更受欢迎。
通过主动交流你可以实现,机器人有被动接受指令到主动交流的跨越,经过体验打分,在个场景下对比非主动交流都获得者明显的体验增益。在实验环境下在百度内部,我们让小度机器人给当天过生日的同学主动送去祝福,带来的效果十分惊艳,带来了十分惊喜的体验。
机器人的自然语言交互模型使得用户得以用最自然最高效的方式与机器人交流,用户情感应对模型使得机器获得情商,主动交流模型是机器人更具吸引力。其中NIRO的每个模型包含三个层次,自然语言交互模型包含识别层,模型层和表现层,从8月开始披露。同时这个模型从九月开始可以通过百度AI人机交互设计院的公众号预约体验。NIRO的情感应对模型,包含识别层,策略层和表现层,从9月开始披露。主动交流模型从8月开始对外披露。
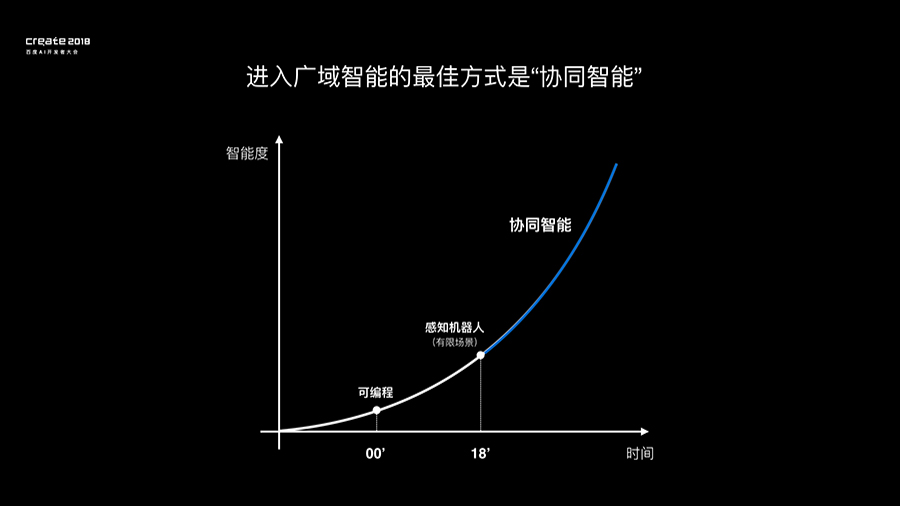
如何扩展机器人使用场景一直是困扰业界的问题,因为机器人的使用环境事实上是为人类设计的,比如门,电或者一个障碍物都会阻碍机器人向更广场景进发,而传统做法是将所有的门都改装成电动,将机器人与电梯系统打通,甚至给机器人安装昂贵的解析手臂。这会上服务机器人的成本急剧提升,使之难以推向市场。而我们相信进入广域智能的最佳方式是“协同智能”。
协同智能的未来是成本最低,效率最高的。而利用NIRO进行设计,你可以让你的机器人快速进入协同智能时代,你也将会成为第一批利用NIRO进行设计的用户。
机器人承载这科技最普世的价值观,他让独自生活的人不在孤独,他让有家庭的人有更多的时间感受亲情。今天让我们从这里起航,共同努力,一起构建一个美好的未来!一起Create more! |